






生物の動きに学ぶロボット開発 ~極限環境で活躍するロボットたち~
中央大学理工学部教授
中村太郎
1.はじめに
最近、生物の機能や形から学んだ様々な製品が注目されている。このような技術思想は、今後も様々な分野において、大きな影響を与えていくだろう。
一方、現在日本がリードしているロボティクス・メカトロニクスの分野に目を向けてみよう。ロボットの重要な役割の一つとして、人間の入り込めないような極限環境(体内、災害現場、宇宙、深海など)での作業が求められている。一方、地球上には長い進化の過程を経てそれぞれの環境に最適な形態で適応した生物が多く存在する。したがって、上記のような環境で生息するような生物の機能を真似たロボットを開発することによって、様々な応用分野への可能性が期待できる。
著者らは、ミミズ、アメンボ、カタツムリ、象の鼻など、種々の生物の機能を規範としたロボットを開発し、宇宙・医療福祉・海底資源探査など、様々な分野への応用を検討している。本稿では、特にミミズの動きに着目したロボット達について紹介する。
2. ミミズの動きを規範とした蠕動運動型ロボット
ミミズをじっくり観察したことがあるだろうか?著者は子供のころよくミミズを観察していたが、どうやらヘビや尺取虫とは違う動きのようで、“うにょうにょ”動く。実はこの“うにょうにょ”は、「蠕動運動」という運動によるものである。蠕動運動とは人間の食道や腸などにも見られる運動で、縦波の伸縮波を一定方向に進行させることによって、対象物を移動させることができる運動である。蠕動運動による移動は速度が遅く、一見効率の悪い運動のように見える。しかし、移動に必要な空間が最も小さく(図1)、周辺環境に対して接地面積を大きく確保することができるなど、他の移動機構には見られない独創的かつ有用な機能を持った移動手段である。このような特徴を持ったミミズは、様々な応用が期待されている。この一例として幾つかのミミズ型ロボットを紹介する。
図1 様々な移動様式
●大腸内視鏡搭載型蠕動運動ロボット
図2に医療用に用いられるミミズ型ロボットを示す。本ロボットはミミズの蠕動運動による推進機構の中に既存の大腸内視鏡が搭載されている。現在、医師が練習用で用いている大腸モデルや、摘出した豚の大腸を使った実験でも数分程度と短時間での推進・通過を確認している。
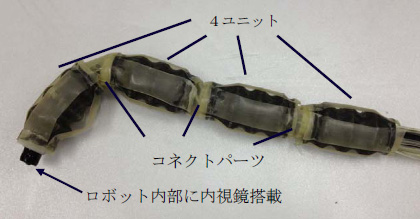
図2 内視鏡搭載型ミミズロボット
●埋没型月・惑星掘削ロボットの開発
月や惑星への地震計の設置やレゴリス(月の砂)層中の地下資源の探索のために、月・惑星の地中探査ができる埋没型ロボットが求められている。図3にミミズ蠕動運動を用いた地中探査ロボットの概要を示す。本ロボットは、レゴリスの掘削・運搬にはアースオーガを、推進・反力支持機構にミミズの蠕動運動を用いることで、土圧や重力の影響を受けない全く新しい掘削ロボットの構築を目指している。現在、このミミズ型掘削ロボットは、地球上においても深海底に潜むレアアースや石油・鉱物・深海の地中生物などの新たな資源探査のための埋没型掘削ロボットとしても注目を集めている。
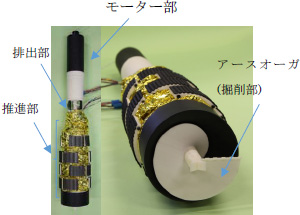
図3 蠕動運動型月地中探査ロボット
●細管内検査ロボットの開発
水道管やガス配管の細管としてよく用いられる25A管や15A管の検査には、工業用内視鏡を使用することが多い。しかし、曲管が多い配管や15m以上の長距離下においては周囲の摩擦の影響で、なかなか先に推し進めることができなくなるため、内視鏡のみで検査することが難しい。そこで本研究では、ミミズの蠕動運動によるカメラ搭載可能な細管検査ロボットを開発した。図4に細管用検査ロボットが連続エルボ通過している様子を示す。さらに、15Aや25A等の細管において複数の連続したエルボを通過しつつ15m以上の長距離の管も検査することができる。
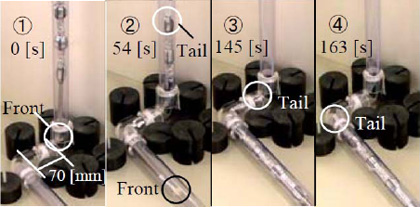
図4 連続エルボの通過試験(25A管)
●大腸の蠕動運動を規範としたポンプ
現在、自然災害時における土砂の搬送や下水処理、工場における食品や汚泥の搬送など、様々な場面において固液混合流体や高粘粘度流体の搬送装置が必要とされている。
そこで、本研究では、腸管の蠕動運動による搬送を人工筋肉によって実現することで、様々な流体を垂直搬送に成功した。一例として図5に固体含有率30%のときの固液体混合流体を垂直搬送している様子を示す。現在このポンプは、固体ロケットの推進薬を作成・搬送する装置や汚泥搬送、セメントの搬送など幅広い分野での応用が期待されている。

図5 蠕動ポンプが固液混合流体を垂直搬送する様子
3.カタツムリの移動を規範とした全方向・壁のぼりロボットの開発
カタツムリは腹足運動という動きによって移動している。この運動は海の波のような進行波に似ており、これを尾部から頭部に伝播することによって移動している。著者らはこの進行波移動を利用して、壁のぼり型ロボットと全方向移動ロボットを開発している。
本移動手段は他の移動手段と比べ設置面積が大きいため、小さい吸着圧力で安定的な壁面・天井移動が実現できる。
また、この進行波をいろいろな方向に伝播させることによって全方向に移動できるようなロボットが実現できる。また底部に永久磁石を用いることで金属の壁面や天井の全方向移動も実現可能となった。これは船舶やガスタンクの点検ロボットへの応用が期待できる。
4.アメンボを規範とした水陸両用移動ロボット
アメンボは水上や陸上を移動でき、空を飛ぶこともできる。また彼らは水上において餌の捕獲や急旋回が可能であることから、従来の船に比べて運動性能や走行安定性も優れている。本研究ではこれらの優れた運動性能に注目し、アメンボのような6脚の水陸両用移動ロボットを開発した。現在、琵琶湖の環境調査ロボットへの応用をめざし開発を進めている。
5.象の鼻ロボット(超冗長マニピュレータ)
象の鼻のようにくにゃくにゃ曲がっているマニピュレータができれば、化学プラント等の複雑に入り組んでいて人間の立ち入りにくい環境での作業もロボットが変わりに作業できる可能性がある。このようなマニピュレータを超冗長マニピュレータと呼ぶ。本研究では、3自由度パラレルメカニズムを多数連結することで、確実に位置制御ができる象の鼻のような超冗長マニピュレータを開発している。
6.おわりに
本稿では身近な生物をお手本とした様々なロボットを紹介した。著者らはこれらのロボットを作って楽しむだけでなく、社会の役に立つロボットを目指している。今後も様々なロボットを作成し実用化に向けて努力していきたい。なお、詳しくは中央大学理工学部中村研究室のHPを参照してほしい。
 中村太郎 Taro Nakamura
中村太郎 Taro Nakamura
1975年生まれ。信州大学大学院工学系研究科博士後期課程修了。1999年、秋田県立大学助手。2004年、中央大学理工学部専任講師、2006年、同大学准教授をへて、2013年より同大学教授。現在に至る。2012-2013年までスイス連邦工科大学ローザンヌ校Visiting Professor。博士(工学)。人工筋肉や機能性流体等のスマートアクチュエータの開発と制御、および生物を規範としたバイオロボティクスの開発と応用に従事。2009年、日本ロボット学会研究奨励賞、2010年、日本機械学会研究奨励賞。2011年、文部科学大臣表彰若手科学者賞などを受賞。近著に「図解 人工筋肉」等がある。